5月19日下午14:30-15:30,英国约克大学机器人学专家朱吉鸿副教授应邀莅临自慰视频
,在黄家湖校区30404报告厅作题为“具身智能:利用大语言模型进行材料推理与长程机器人操作”的学术报告。本次活动由自慰视频
林云汉老师主持,相关领域师生到场聆听学习。
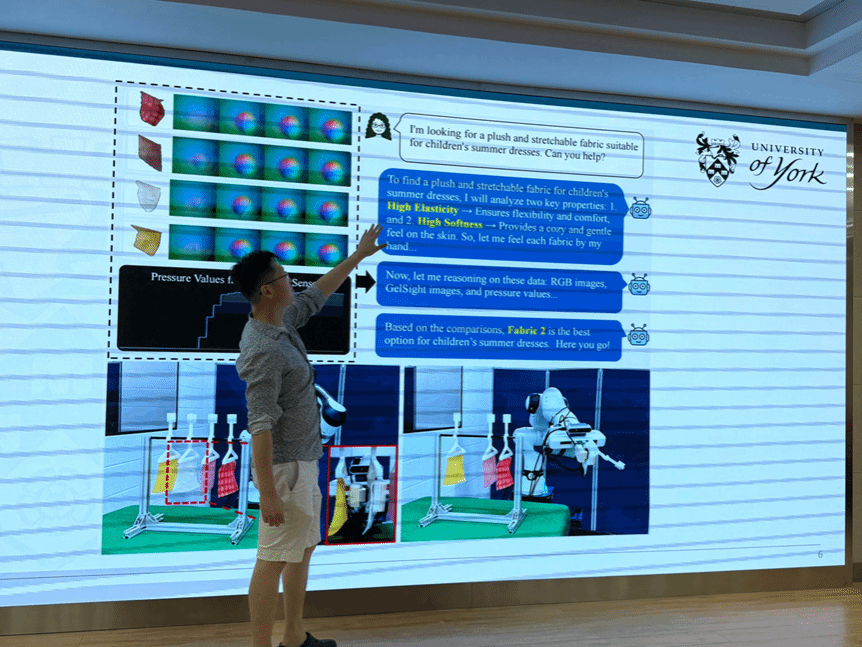
报告中,朱吉鸿副教授围绕大语言模型与机器人技术的融合核心,分享了团队在纺织品制造与自动化化学两个领域的最新研究成果。首先,他介绍了MLLM-Fabric多模态材料推理框架。针对传统布料感知仅依赖视觉、无法准确评估物理属性的行业痛点,团队采集了200余种不同布料的RGB图像、Gelsight触觉信号与压力数据,并通过在传感器末端加装特制小凸起优化触觉信号质量,构建了一个包含多维度物理属性标注的专用多模态数据集。基于该数据集,团队通过监督微调和解释引导的知识蒸馏技术,训练出Fabric-Llama-90B专用模型,能够根据用户对柔软度、弹性、拉伸性等具体需求,对多种布料进行智能排序与精准选择,在二分类对比和四选一选择任务上的准确率显著优于现有通用多模态大模型。
报告的第二部分朱教授分享了TARMAC化学机器人操作分类法。他提到,实验室2024年与化学自慰视频
教授的跨学科合作开启了这一极具潜力的新方向。针对当前大模型生成的实验流程缺乏物理执行基础、纯黑箱模型无法满足化学实验高安全性要求的核心问题,团队系统分析了91个本科化学实验教学视频,与化学专业学生深度合作,基于力依赖性、运动模式、直接操作性三个核心特征,将所有化学实验动作分解为四类可解释的最小运动单元,构建了结构化的动作原语体系。该体系为大语言模型提供了可落地的物理执行基础,能够将抽象的自然语言实验指令转化为机器人可直接执行的模块化工作流,大幅提升了化学实验自动化的安全性、可解释性与可靠性。
报告尾声,朱吉鸿副教授与现场师生围绕柔性物体操作的核心难点、扩散模型在机器人动作生成中的应用瓶颈等关键问题展开热烈交流,深入探讨了柔性物体非刚性形变感知、扩散模型采样效率等实践难题,为在场师生提供了切实可行的研究思路。本次报告不仅系统展现了具身智能在材料推理与科学自动化领域的前沿进展,更聚焦柔性物体操作与扩散模型的交叉融合,为自慰视频
师生在机器人与人工智能交叉研究方向指明了清晰的研究路径。活动促进了自慰视频
与国际前沿研究团队的学术对话与思想碰撞,激励着师生们深耕细研、勇于创新,为推动机器人技术的智能化落地与实用化发展贡献力量。